
Robotik, insanları programlamayla tanıştırmanın heyecan verici bir yoludur, ancak bazen yeni başlayanlar için alışması biraz zor ve pahalı olabilir.
Herkesin yapımı kolay ve uygun maliyetli bir robot yaratmasını sağlamak, öğrenmelerinde önemli bir adımdır. Dolayısıyla bu eğitimde kendi robotumuzu yapacağız ve herkesin onu kontrol etmesini sağlayan bir Python 3 kütüphanesi oluşturacağız.
Bu proje için şunlara ihtiyacınız olacak: Raspberry Pi'nin herhangi bir modeli; Raspbian , bir Wi-Fi donanım kilidi ve Raspberry Pi'yi ev yönlendiricinize bağlayın; bir USB pil paketi, bir robot şasi kiti (yeni sekmede açılır) , bir L298N motor kontrolörü (yeni sekmede açılır) ; dört adet AA pil ve biraz Blu-tack.
Bir robot şasisi oluşturmak harika bir aktivitedir ve kit (yukarıda bahsedilen), başlamak için ihtiyacınız olan her şeyle birlikte gelir. Kırmızı ve siyah kabloları motor terminallerine lehimlemeniz gerekecek, eğer lehim yapamıyorsanız, o zaman şimdi bir arkadaşınızdan öğrenmenin tam zamanı.
Lehimleme
Bu projede eBay'den iki DC motor içeren bir robot şasi kiti satın aldık. Bu motorlar monte edilmiş olarak gelir ancak güç için terminallere iki telin lehimlenmesini gerektirir. Lehimleme temel bir yapımcı becerisidir ve öğrenmesi gerçekten kolaydır, ancak oradaki daha genç lehim adaylarımız için yetişkin gözetimi çok önemlidir.
Birçok YouTube eğitim videosu var, ancak en iyisi Carrie Anne Philbin'den (aşağıda).
Havya setleri yaklaşık 10 £ karşılığında satın alınabilir, ancak iyi bir örnek, yaklaşık 25 £ karşılığında Antex XS25'tir; bu, orta seviye havya için harika bir başlangıçtır.
Lehimleme, temiz bir çalışma alanı olan geniş, iyi havalandırılan bir odada yapılmalıdır. Lehimleme çok eğlencelidir ve yerel hackspace/LUG'niz güvenli bir şekilde öğrenmenize yardımcı olabilir.
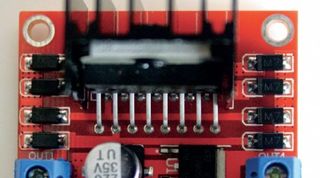
Oluşturulan şasi ile şimdi bir L298N H köprü denetleyicisi olan motor denetleyicisine odaklanıyoruz. Bir H köprüsü, bir motorun ileri ve geri gitmesini sağlar. L298N modelimizin motorlarımız için iki çıkışı vardır, sol tarafa OUT1 ve 2, sağ tarafa OUT3 ve 4 hizmet verir.
Motorlarınızdan gelen kabloları bu terminallere bağlayın ve sağlam olduklarından emin olun. AA pil paketimiz +12V ve GND terminaline bağlanır.
Ayrıca Raspberry Pi'mizin GND'lerinden birini L298N GND terminaline bağlamamız gerekiyor. L298N'de IN1 ile IN4 arasında işaretlenmiş dört pin görebiliriz. Raspberry Pi GPIO (Genel Amaçlı Giriş Çıkışı) pinlerimize L298N'yi bağlamak için kullandığımız girişlerdir.
Bir GPIO pinini açıp kapatarak giriş pinlerini buna göre tetikleyebilir ve motor yönünü kontrol edebiliriz. Girişlerimizi şu GPIO pinlerine bağladık: IN1 - 17, IN2 - 22, IN3 - 18 ve IN4 - 23. Raspberry Pi Foundation tarafından belirlenen bir standart olan Broadcom pin eşlemesini kullandık.
Broadcom pin eşlemesini açıklayan GPIO için bu harika referansa göz atın .
- Raspberry Pi Projeleri koleksiyonumuzla küçük bilgisayarla başka neler yapabileceğinizi öğrenin